place_poles#
- scipy.signal.place_poles(A, B, poles, method='YT', rtol=0.001, maxiter=30)[源代码]#
计算 K 使特征值 (A - dot(B, K))=poles。
K 是增益矩阵,使得线性系统
AX+BU描述的设备将使其闭环极点,即特征值A - B*K,尽可能接近 poles 中要求的值。支持 SISO、MISO 和 MIMO 系统。
- 参数:
- A, Bndarray
线性系统
AX + BU的状态空间表示。- polesarray_like
期望的实极点和/或复共轭极点。复极点仅在
method="YT"(默认)时受支持。- method: {‘YT’, ‘KNV0’}, 可选
选择哪种方法来查找增益矩阵 K。以下之一:
‘YT’: Yang Tits (杨·提茨)
‘KNV0’: Kautsky, Nichols, Van Dooren 更新方法 0
有关算法的详细信息,请参阅参考文献和说明。
- rtol: float, 可选
每次迭代后,将
A - B*K的特征向量的行列式与其前一个值进行比较,当这两个值之间的相对误差低于 rtol 时,算法停止。默认值为 1e-3。- maxiter: int, 可选
计算增益矩阵的最大迭代次数。默认值为 30。
- 返回:
- full_state_feedbackBunch 对象
- full_state_feedback 由以下部分组成:
- gain_matrix1-D ndarray
闭环矩阵 K,使得
A-BK的特征值尽可能接近请求的极点。- computed_poles1-D ndarray
与
A-BK对应的极点,首先按增序排列的实极点,然后按字典序排列的复共轭极点。- requested_poles1-D ndarray
算法被要求放置的极点,按上述方式排序,它们可能与实际实现的不同。
- X2-D ndarray
传递矩阵,使得
X * diag(poles) = (A - B*K)*X(参见说明)- rtolfloat
在
det(X)上达到的相对容差(参见说明)。如果可以求解系统diag(poles) = (A - B*K),则 rtol 将为 NaN;如果优化算法无法执行任何操作(例如B.shape[1] == 1),则为 0。- nb_iterint
收敛前执行的迭代次数。如果可以求解系统
diag(poles) = (A - B*K),则 nb_iter 将为 NaN;如果优化算法无法执行任何操作(例如B.shape[1] == 1),则为 0。
说明
Tits 和 Yang (YT) [2] 的论文是 Kautsky 等人 (KNV) 原始论文 [1] 的更新。KNV 依赖于秩-1 更新来找到传递矩阵 X,使得
X * diag(poles) = (A - B*K)*X,而 YT 使用秩-2 更新。这平均产生更鲁棒的解(参见 [2] 第 21-22 页),此外,YT 算法支持复极点,而 KNV 的原始版本不支持。此处仅实现了 KNV 提出的更新方法 0,因此命名为'KNV0'。MATLAB 的
place函数中使用了扩展到复极点的 KNV,YT 以robpole的名称由 Slicot 在非自由许可证下分发。KNV0 如何扩展到复极点尚不清楚且没有文档(Tits 和 Yang 在他们的论文第 14 页声称他们的方法不能用于将 KNV 扩展到复极点),因此在此实现中,只有 YT 支持复极点。由于 MIMO 系统的极点配置问题解不唯一,两种方法都从一个试验性传递矩阵开始,该矩阵以各种方式进行修改以增加其行列式。这两种方法都被证明能收敛到稳定的解,但根据初始传递矩阵的选择方式,它们将收敛到不同的解,因此绝不保证使用
'KNV0'会产生与 MATLAB 或这些算法的任何其他实现类似的结果。在大多数情况下,使用默认方法
'YT'应该没问题;'KNV0'仅在某些特定情况下被'YT'需要时才提供。此外,当abs(det(X))用作鲁棒性指标时,'YT'平均比'KNV0'给出更鲁棒的结果。[2] 可在以下 URL 作为技术报告获取:https://hdl.handle.net/1903/5598
参考文献
示例
一个简单的示例,演示了使用 KNV 和 YT 算法进行实极点配置。这是参考文献 KNV 出版物 ([1]) 第 4 节中的示例 1。
>>> import numpy as np >>> from scipy import signal >>> import matplotlib.pyplot as plt
>>> A = np.array([[ 1.380, -0.2077, 6.715, -5.676 ], ... [-0.5814, -4.290, 0, 0.6750 ], ... [ 1.067, 4.273, -6.654, 5.893 ], ... [ 0.0480, 4.273, 1.343, -2.104 ]]) >>> B = np.array([[ 0, 5.679 ], ... [ 1.136, 1.136 ], ... [ 0, 0, ], ... [-3.146, 0 ]]) >>> P = np.array([-0.2, -0.5, -5.0566, -8.6659])
现在使用 KNV 方法 0、默认的 YT 方法以及强制算法迭代 100 次的 YT 方法计算 K,并在每次调用后打印一些结果。
>>> fsf1 = signal.place_poles(A, B, P, method='KNV0') >>> fsf1.gain_matrix array([[ 0.20071427, -0.96665799, 0.24066128, -0.10279785], [ 0.50587268, 0.57779091, 0.51795763, -0.41991442]])
>>> fsf2 = signal.place_poles(A, B, P) # uses YT method >>> fsf2.computed_poles array([-8.6659, -5.0566, -0.5 , -0.2 ])
>>> fsf3 = signal.place_poles(A, B, P, rtol=-1, maxiter=100) >>> fsf3.X array([[ 0.52072442+0.j, -0.08409372+0.j, -0.56847937+0.j, 0.74823657+0.j], [-0.04977751+0.j, -0.80872954+0.j, 0.13566234+0.j, -0.29322906+0.j], [-0.82266932+0.j, -0.19168026+0.j, -0.56348322+0.j, -0.43815060+0.j], [ 0.22267347+0.j, 0.54967577+0.j, -0.58387806+0.j, -0.40271926+0.j]])
X 的行列式的绝对值是检查结果鲁棒性的一个良好指标,
'KNV0'和'YT'都旨在最大化它。下面是上述结果鲁棒性的比较>>> abs(np.linalg.det(fsf1.X)) < abs(np.linalg.det(fsf2.X)) True >>> abs(np.linalg.det(fsf2.X)) < abs(np.linalg.det(fsf3.X)) True
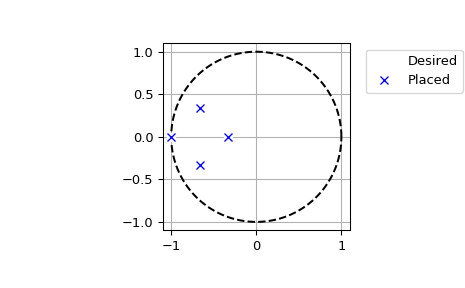
现在是一个复极点的简单示例
>>> A = np.array([[ 0, 7/3., 0, 0 ], ... [ 0, 0, 0, 7/9. ], ... [ 0, 0, 0, 0 ], ... [ 0, 0, 0, 0 ]]) >>> B = np.array([[ 0, 0 ], ... [ 0, 0 ], ... [ 1, 0 ], ... [ 0, 1 ]]) >>> P = np.array([-3, -1, -2-1j, -2+1j]) / 3. >>> fsf = signal.place_poles(A, B, P, method='YT')
我们可以在复平面上绘制期望的和计算出的极点
>>> t = np.linspace(0, 2*np.pi, 401) >>> plt.plot(np.cos(t), np.sin(t), 'k--') # unit circle >>> plt.plot(fsf.requested_poles.real, fsf.requested_poles.imag, ... 'wo', label='Desired') >>> plt.plot(fsf.computed_poles.real, fsf.computed_poles.imag, 'bx', ... label='Placed') >>> plt.grid() >>> plt.axis('image') >>> plt.axis([-1.1, 1.1, -1.1, 1.1]) >>> plt.legend(bbox_to_anchor=(1.05, 1), loc=2, numpoints=1)