scipy.ndimage.
spline_filter#
- scipy.ndimage.spline_filter(input, order=3, output=<class 'numpy.float64'>, mode='mirror')[source]#
多维样条滤波器。
- 参数:
- input类数组
输入数组。
- order整型,可选
样条的阶数,默认为 3。
- outputndarray 或 dtype,可选
用于放置输出的数组,或返回数组的数据类型。默认为
numpy.float64。- mode{‘reflect’, ‘grid-mirror’, ‘constant’, ‘grid-constant’, ‘nearest’, ‘mirror’, ‘grid-wrap’, ‘wrap’},可选
mode 参数决定了输入数组在其边界之外的扩展方式。默认值为 ‘mirror’。每个有效值的行为如下(有关 边界模式 的更多图表和详细信息,请参阅)
- ‘reflect’ (d c b a | a b c d | d c b a)
通过围绕最后一个像素的边缘进行反射来扩展输入。此模式有时也称为半样本对称。
- ‘grid-mirror’
这是 ‘reflect’ 的同义词。
- ‘constant’ (k k k k | a b c d | k k k k)
通过使用 cval 参数定义的相同常量值填充边界之外的所有值来扩展输入。在输入边界之外不执行插值。
- ‘grid-constant’ (k k k k | a b c d | k k k k)
通过使用 cval 参数定义的相同常量值填充边界之外的所有值来扩展输入。插值也发生在输入范围之外的样本上。
- ‘nearest’ (a a a a | a b c d | d d d d)
通过复制最后一个像素来扩展输入。
- ‘mirror’ (d c b | a b c d | c b a)
通过围绕最后一个像素的中心进行反射来扩展输入。此模式有时也称为全样本对称。
- ‘grid-wrap’ (a b c d | a b c d | a b c d)
通过环绕到对边来扩展输入。
- ‘wrap’ (d b c d | a b c d | b c a b)
通过环绕到对边来扩展输入,但方式是使最后一个点和初始点完全重叠。在这种情况下,在重叠点选择哪个样本没有明确定义。
- 返回:
- spline_filterndarray
过滤后的数组。与 input 具有相同的形状。
另请参阅
spline_filter1d沿给定轴计算一维样条滤波器。
备注
多维滤波器实现为一系列一维样条滤波器。中间数组以与输出相同的数据类型存储。因此,对于精度有限的输出类型,结果可能不精确,因为中间结果可能以不精确的精度存储。
对于复数值 input,此函数独立处理实部和虚部。
版本 1.6.0 新增: 增加了复数值支持。
示例
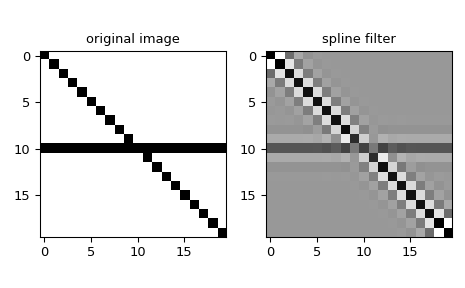
我们可以使用多维样条滤波器过滤图像
>>> from scipy.ndimage import spline_filter >>> import numpy as np >>> import matplotlib.pyplot as plt >>> orig_img = np.eye(20) # create an image >>> orig_img[10, :] = 1.0 >>> sp_filter = spline_filter(orig_img, order=3) >>> f, ax = plt.subplots(1, 2, sharex=True) >>> for ind, data in enumerate([[orig_img, "original image"], ... [sp_filter, "spline filter"]]): ... ax[ind].imshow(data[0], cmap='gray_r') ... ax[ind].set_title(data[1]) >>> plt.tight_layout() >>> plt.show()