odeint#
- scipy.integrate.odeint(func, y0, t, args=(), Dfun=None, col_deriv=0, full_output=0, ml=None, mu=None, rtol=None, atol=None, tcrit=None, h0=0.0, hmax=0.0, hmin=0.0, ixpr=0, mxstep=0, mxhnil=0, mxordn=12, mxords=5, printmessg=0, tfirst=False)[源码]#
积分常微分方程组。
注意
对于新代码,请使用
scipy.integrate.solve_ivp来求解微分方程。使用 FORTRAN 库 odepack 中的 lsoda 求解常微分方程组。
求解一阶常微分方程的刚性或非刚性系统的初值问题
dy/dt = func(y, t, ...) [or func(t, y, ...)]
其中 y 可以是向量。
注意
默认情况下,func 的前两个参数的所需顺序与
scipy.integrate.ode类和函数scipy.integrate.solve_ivp使用的系统定义函数中的参数顺序相反。要使用签名func(t, y, ...)的函数,参数 tfirst 必须设置为True。- 参数:
- funccallable(y, t, …) or callable(t, y, …)
计算 y 在 t 处的导数。如果签名为
callable(t, y, ...),则参数 tfirst 必须设置为True。func 不得修改 y 中的数据,因为它是由 ODE 求解器内部使用的数据视图。- y0array
y 的初始条件(可以是向量)。
- tarray
求解 y 的时间点序列。初始值点应是此序列的第一个元素。此序列必须是单调递增或单调递减的;允许重复值。
- argstuple, optional
传递给函数的额外参数。
- Dfuncallable(y, t, …) or callable(t, y, …)
func 的梯度(雅可比矩阵)。如果签名为
callable(t, y, ...),则参数 tfirst 必须设置为True。Dfun 不得修改 y 中的数据,因为它是由 ODE 求解器内部使用的数据视图。- col_derivbool, optional
如果 Dfun 定义了按列的导数(更快),则为 True;否则 Dfun 应定义按行的导数。
- full_outputbool, optional
如果将可选输出字典作为第二个输出返回,则为 True。
- printmessgbool, optional
是否打印收敛消息
- tfirstbool, optional
如果为 True,func(如果给出 Dfun,也包括 Dfun)的前两个参数必须是
t, y,而不是默认的y, t。1.1.0 版新增。
- 返回值:
- yarray, shape (len(t), len(y0))
包含 y 在 t 中每个所需时间的值的数组,初始值 y0 在第一行。
- infodictdict, only returned if full_output == True
包含额外输出信息的字典
键
含义
‘hu’
每个时间步成功使用的步长向量
‘tcur’
每个时间步达到的 t 值向量(将始终至少与输入时间一样大)
‘tolsf’
容差比例因子向量,大于 1.0,在检测到精度要求过高时计算
‘tsw’
上次方法切换时 t 的值(为每个时间步给出)
‘nst’
累积时间步数
‘nfe’
每个时间步的累积函数评估次数
‘nje’
每个时间步的累积雅可比评估次数
‘nqu’
每个成功步的方法阶数向量
‘imxer’
在错误返回时,加权局部误差向量 (e / ewt) 中最大分量的索引,否则为 -1
‘lenrw’
所需的双精度工作数组的长度
‘leniw’
所需的整数工作数组的长度
‘mused’
每个成功时间步的方法指示符向量:1: adams(非刚性),2: bdf(刚性)
- 其他参数:
- ml, muint, optional
如果这些参数中的任何一个不是 None 或非负数,则假定雅可比矩阵是带状的。它们给出了此带状矩阵中下部和上部非零对角线的数量。对于带状情况,Dfun 应返回一个矩阵,其行包含非零带(从最低对角线开始)。因此,当
ml >=0或mu >=0时,从 Dfun 返回的矩阵 jac 的形状应为(ml + mu + 1, len(y0))。jac 中的数据必须以jac[i - j + mu, j]包含第i个方程相对于第j个状态变量的导数的方式存储。如果 col_deriv 为 True,则必须返回此 jac 的转置。- rtol, atolfloat, optional
输入参数 rtol 和 atol 决定了求解器执行的误差控制。求解器将根据
max-norm of (e / ewt) <= 1的形式的不等式来控制 y 中估计局部误差向量 e,其中 ewt 是一个正误差权重向量,计算公式为ewt = rtol * abs(y) + atol。rtol 和 atol 可以是与 y 长度相同的向量,也可以是标量。默认值为 1.49012e-8。- tcritndarray, optional
需要注意积分的临界点(例如,奇点)向量。
- h0浮点数, (0: 求解器决定), 可选
第一步尝试的步长。
- hmax浮点数, (0: 求解器决定), 可选
允许的最大绝对步长。
- hmin浮点数, (0: 求解器决定), 可选
允许的最小绝对步长。
- ixpr布尔值, 可选
在方法切换时是否生成额外的打印输出。
- mxstep整数, (0: 求解器决定), 可选
t 中每个积分点允许的最大(内部定义的)步数。
- mxhnil整数, (0: 求解器决定), 可选
打印的最大消息数。
- mxordn整数, (0: 求解器决定), 可选
非刚性 (Adams) 方法允许的最大阶数。
- mxords整数, (0: 求解器决定), 可选
刚性 (BDF) 方法允许的最大阶数。
示例
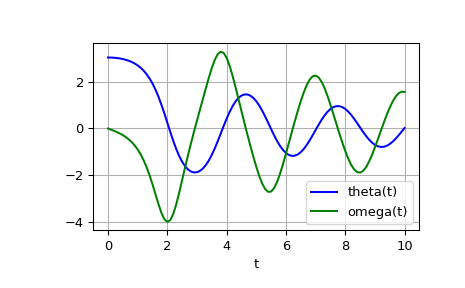
受重力作用且有摩擦的摆的角 theta 的二阶微分方程可以写成
theta''(t) + b*theta'(t) + c*sin(theta(t)) = 0
其中 b 和 c 是正常数,撇号 (’) 表示导数。要使用
odeint求解此方程,我们必须首先将其转换为一阶方程组。通过定义角速度omega(t) = theta'(t),我们得到系统theta'(t) = omega(t) omega'(t) = -b*omega(t) - c*sin(theta(t))
设 y 为向量 [theta, omega]。我们在 Python 中实现此系统如下:
>>> import numpy as np >>> def pend(y, t, b, c): ... theta, omega = y ... dydt = [omega, -b*omega - c*np.sin(theta)] ... return dydt ...
我们假设常数 b = 0.25 和 c = 5.0
>>> b = 0.25 >>> c = 5.0
对于初始条件,我们假设摆几乎垂直,theta(0) = pi - 0.1,并且初始时处于静止状态,因此 omega(0) = 0。那么初始条件向量为
>>> y0 = [np.pi - 0.1, 0.0]
我们将在 0 <= t <= 10 的区间内,在 101 个等间隔的样本点生成解决方案。因此我们的时间数组是
>>> t = np.linspace(0, 10, 101)
调用
odeint以生成解决方案。要将参数 b 和 c 传递给 pend,我们通过 args 参数将它们提供给odeint。>>> from scipy.integrate import odeint >>> sol = odeint(pend, y0, t, args=(b, c))
解决方案是一个形状为 (101, 2) 的数组。第一列是 theta(t),第二列是 omega(t)。以下代码绘制了这两个分量。
>>> import matplotlib.pyplot as plt >>> plt.plot(t, sol[:, 0], 'b', label='theta(t)') >>> plt.plot(t, sol[:, 1], 'g', label='omega(t)') >>> plt.legend(loc='best') >>> plt.xlabel('t') >>> plt.grid() >>> plt.show()