scipy.spatial.cKDTree.
query_ball_point#
- cKDTree.query_ball_point(self, x, r, p=2., eps=0, workers=1, return_sorted=None, return_length=False)#
查找点 x 距离 r 内的所有点。
- 参数:
- xarray_like, shape tuple + (self.m,)
要搜索邻居的点。
- rarray_like, float
要返回的点的半径,应广播到 x 的长度。
- pfloat, optional
要使用的 Minkowski p-范数。应该在 [1, inf] 范围内。如果可能发生溢出,则有限的大 p 可能会导致 ValueError。
- epsnonnegative float, optional
近似搜索。如果树的分支的最近点距离大于
r / (1 + eps),则不探索这些分支,如果其最远点比r * (1 + eps)更近,则批量添加分支。- workersint, optional
安排用于并行处理的作业数。如果给定 -1,则使用所有处理器。默认值:1。
在版本 1.9.0 中更改: “n_jobs”参数已重命名为“workers”。旧名称“n_jobs”已在 SciPy 1.6.0 中弃用,并在 SciPy 1.9.0 中删除。
- return_sortedbool, optional
如果为 True 则对返回的索引进行排序,如果为 False 则不对其进行排序。 如果为 None,则不对单点查询进行排序,但会对多点查询进行排序,这是添加此选项之前的行为。
1.2.0 版本中新增。
- return_length: bool, optional
返回半径内的点数,而不是索引列表。 .. versionadded:: 1.3.0
- 返回值:
- results列表或列表数组
如果 x 是单点,则返回 x 的邻居的索引列表。 如果 x 是点数组,则返回包含邻居列表的 shape tuple 对象数组。
注释
如果您有很多想要查找邻居的点,您可以通过将它们放入 cKDTree 并使用 query_ball_tree 来节省大量时间。
示例
>>> import numpy as np >>> from scipy import spatial >>> x, y = np.mgrid[0:4, 0:4] >>> points = np.c_[x.ravel(), y.ravel()] >>> tree = spatial.cKDTree(points) >>> tree.query_ball_point([2, 0], 1) [4, 8, 9, 12]
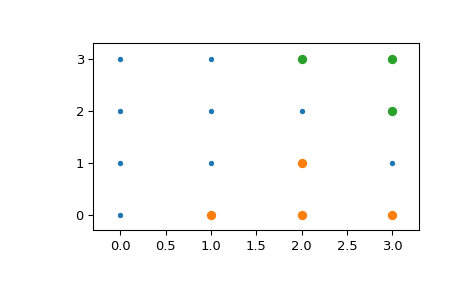
查询多个点并绘制结果
>>> import matplotlib.pyplot as plt >>> points = np.asarray(points) >>> plt.plot(points[:,0], points[:,1], '.') >>> for results in tree.query_ball_point(([2, 0], [3, 3]), 1): ... nearby_points = points[results] ... plt.plot(nearby_points[:,0], nearby_points[:,1], 'o') >>> plt.margins(0.1, 0.1) >>> plt.show()