HalfspaceIntersection#
- class scipy.spatial.HalfspaceIntersection(halfspaces, interior_point, incremental=False, qhull_options=None)#
N 维半空间交集。
0.19.0 版本新增。
- 参数:
- halfspaces浮点型 ndarray,形状 (nineq, ndim+1)
Ax + b <= 0 形式的堆叠不等式,格式为 [A; b]
- interior_point浮点型 ndarray,形状 (ndim,)
明确位于半空间定义区域内的点。也称为可行点,可以通过线性规划获得。
- incremental布尔型,可选
允许增量添加新的半空间。这会占用一些额外资源。
- qhull_options字符串,可选
传递给 Qhull 的额外选项。详见 Qhull 手册。(默认:ndim > 4 时为“Qx”,否则为空字符串)选项“H”始终启用。
- 属性:
- halfspaces双精度浮点型 ndarray,形状 (nineq, ndim+1)
输入的半空间。
- interior_point :浮点型 ndarray,形状 (ndim,)
输入的内部点。
- intersections双精度浮点型 ndarray,形状 (ninter, ndim)
所有半空间的交点。
- dual_points双精度浮点型 ndarray,形状 (nineq, ndim)
输入半空间的对偶点。
- dual_facets整数列表的列表
构成对偶凸包的(不一定是单形的)面的点索引。
- dual_vertices整数型 ndarray,形状 (nvertices,)
构成对偶凸包顶点的半空间索引。对于二维凸包,顶点按逆时针顺序排列。对于其他维度,它们按输入顺序排列。
- dual_equations双精度浮点型 ndarray,形状 (nfacet, ndim+1)
[法向量,偏移] 构成对偶面的超平面方程(详见 Qhull 文档)。
- dual_area浮点型
对偶凸包的面积
- dual_volume浮点型
对偶凸包的体积
方法
add_halfspaces(halfspaces[, restart])处理一组额外的新半空间。
close()完成增量处理。
- 引发:
- QhullError
当 Qhull 遇到错误条件时引发,例如未启用解决选项时的几何退化。
- ValueError
如果输入不兼容的数组则引发。
备注
交集是使用 Qhull 库 计算的。这重现了 Qhull 的“qhalf”功能。
参考文献
[Qhull][1]S. Boyd, L. Vandenberghe, Convex Optimization,可在此处获取:http://stanford.edu/~boyd/cvxbook/
示例
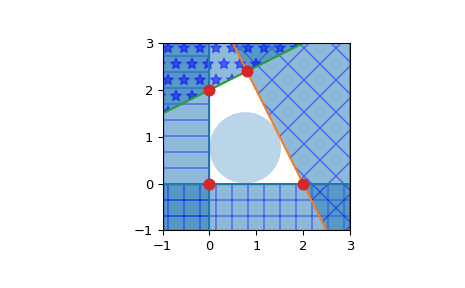
形成多边形的半空间交集
>>> from scipy.spatial import HalfspaceIntersection >>> import numpy as np >>> halfspaces = np.array([[-1, 0., 0.], ... [0., -1., 0.], ... [2., 1., -4.], ... [-0.5, 1., -2.]]) >>> feasible_point = np.array([0.5, 0.5]) >>> hs = HalfspaceIntersection(halfspaces, feasible_point)
将半空间绘制为填充区域和交点
>>> import matplotlib.pyplot as plt >>> fig = plt.figure() >>> ax = fig.add_subplot(1, 1, 1, aspect='equal') >>> xlim, ylim = (-1, 3), (-1, 3) >>> ax.set_xlim(xlim) >>> ax.set_ylim(ylim) >>> x = np.linspace(-1, 3, 100) >>> symbols = ['-', '+', 'x', '*'] >>> signs = [0, 0, -1, -1] >>> fmt = {"color": None, "edgecolor": "b", "alpha": 0.5} >>> for h, sym, sign in zip(halfspaces, symbols, signs): ... hlist = h.tolist() ... fmt["hatch"] = sym ... if h[1]== 0: ... ax.axvline(-h[2]/h[0], label='{}x+{}y+{}=0'.format(*hlist)) ... xi = np.linspace(xlim[sign], -h[2]/h[0], 100) ... ax.fill_between(xi, ylim[0], ylim[1], **fmt) ... else: ... ax.plot(x, (-h[2]-h[0]*x)/h[1], label='{}x+{}y+{}=0'.format(*hlist)) ... ax.fill_between(x, (-h[2]-h[0]*x)/h[1], ylim[sign], **fmt) >>> x, y = zip(*hs.intersections) >>> ax.plot(x, y, 'o', markersize=8)
默认情况下,Qhull 不提供计算内部点的方法。这可以通过线性规划轻松计算。考虑 \(Ax + b \leq 0\) 形式的半空间,求解线性规划
\[ \begin{align}\begin{aligned}max \: y\\s.t. Ax + y ||A_i|| \leq -b\end{aligned}\end{align} \]其中 \(A_i\) 是 A 的行,即每个平面的法向量。
这将产生一个位于凸多面体内部最深处的点 x。确切地说,它是内切于多面体的最大半径为 y 的超球体中心。这个点被称为多面体的切比雪夫中心(参见 [1] 4.3.1, pp148-149)。Qhull 输出的方程总是归一化的。
>>> from scipy.optimize import linprog >>> from matplotlib.patches import Circle >>> norm_vector = np.reshape(np.linalg.norm(halfspaces[:, :-1], axis=1), ... (halfspaces.shape[0], 1)) >>> c = np.zeros((halfspaces.shape[1],)) >>> c[-1] = -1 >>> A = np.hstack((halfspaces[:, :-1], norm_vector)) >>> b = - halfspaces[:, -1:] >>> res = linprog(c, A_ub=A, b_ub=b, bounds=(None, None)) >>> x = res.x[:-1] >>> y = res.x[-1] >>> circle = Circle(x, radius=y, alpha=0.3) >>> ax.add_patch(circle) >>> plt.legend(bbox_to_anchor=(1.6, 1.0)) >>> plt.show()