rank_filter#
- scipy.ndimage.rank_filter(input, rank, size=None, footprint=None, output=None, mode='reflect', cval=0.0, origin=0, *, axes=None)[source]#
计算多维秩滤波器。
- 参数:
- inputarray_like
输入数组。
- rankint
秩参数可以小于零,即 rank = -1 表示最大元素。
- size标量或元组,可选
参见下面的 footprint。如果 footprint 已给定,则忽略。
- footprint数组,可选
必须定义 size 或 footprint。 size 表示从输入数组中为每个元素位置获取的形状,以定义滤镜函数的输入。 footprint 是一个布尔数组,它(隐式地)指定一个形状,并且还指定该形状内哪些元素将传递给滤镜函数。因此
size=(n,m)等同于footprint=np.ones((n,m))。 我们会将 size 调整为与输入数组的维度数量一致,因此如果输入数组的形状是 (10,10,10),并且 size 是 2,则实际使用的尺寸是 (2,2,2)。当 footprint 被给出时, size 将被忽略。- output数组或 dtype,可选
放置输出的数组,或返回数组的 dtype。默认情况下,将创建与输入具有相同 dtype 的数组。
- mode{‘reflect’, ‘constant’, ‘nearest’, ‘mirror’, ‘wrap’},可选
mode 参数决定了输入数组如何在其边界之外进行扩展。默认值为 'reflect'。每个有效值的行为如下:
- ‘reflect’(d c b a | a b c d | d c b a)
通过围绕最后一个像素的边缘进行反射来扩展输入。此模式有时也称为半样本对称。
- ‘constant’(k k k k | a b c d | k k k k)
通过用相同的常数值(由 cval 参数定义)填充超出边缘的所有值来扩展输入。
- ‘nearest’(a a a a | a b c d | d d d d)
通过复制最后一个像素来扩展输入。
- ‘mirror’(d c b | a b c d | c b a)
通过围绕最后一个像素的中心进行反射来扩展输入。此模式有时也称为全样本对称。
- ‘wrap’(a b c d | a b c d | a b c d)
通过环绕到对边来扩展输入。
为了与插值函数保持一致,也可以使用以下模式名称:
- ‘grid-mirror’
这是 ‘reflect’ 的同义词。
- ‘grid-constant’
这是 ‘constant’ 的同义词。
- ‘grid-wrap’
这是 ‘wrap’ 的同义词。
- cval标量,可选
如果 mode 为 'constant',则用于填充输入超出边缘的值。默认值为 0.0。
- origin整数或序列,可选
控制滤镜在输入数组像素上的放置。值为 0(默认值)将滤镜居中于像素,正值将滤镜向左移动,负值向右移动。通过传递与输入数组维度数量相等的原点序列,可以沿着每个轴指定不同的偏移量。
- axes整数元组或 None,可选
如果为 None,则沿所有轴过滤 input。否则,沿指定的轴过滤 input。当指定 axes 时,用于 size、 origin 和/或 mode 的任何元组必须与 axes 的长度匹配。这些元组中的第 i 个条目对应于 axes 中的第 i 个条目。
- 返回:
- rank_filterndarray
过滤后的数组。与 input 具有相同的形状。
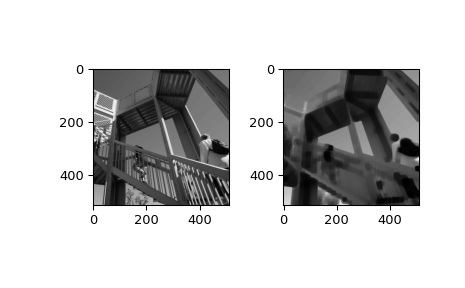
示例
>>> from scipy import ndimage, datasets >>> import matplotlib.pyplot as plt >>> fig = plt.figure() >>> plt.gray() # show the filtered result in grayscale >>> ax1 = fig.add_subplot(121) # left side >>> ax2 = fig.add_subplot(122) # right side >>> ascent = datasets.ascent() >>> result = ndimage.rank_filter(ascent, rank=42, size=20) >>> ax1.imshow(ascent) >>> ax2.imshow(result) >>> plt.show()