RigidTransform#
- class scipy.spatial.transform.RigidTransform#
3 维刚性变换。
此类提供了一个接口,用于从 3D 空间中的刚性变换(旋转和平移)进行初始化和表示。在不同的领域,这种类型的变换可能被称为“姿势”(尤其是在机器人技术中)、“外部参数”或“模型矩阵”(尤其是在计算机图形学中),但核心概念是相同的:描述一个 3D 坐标系相对于另一个坐标系的旋转和平移。从数学上讲,这些变换属于特殊欧几里德群 SE(3),它编码了旋转 (SO(3)) 加上平移。
支持对刚性变换执行以下操作
在向量上应用
变换组合
变换求逆
变换索引
请注意,坐标系必须是右手坐标系。因此,此类更精确地表示 SE(3) 中的真刚性变换,而不是更普遍的 E(3) 中的刚性变换 [1]。
由于多个变换可以存储在单个
RigidTransform实例中,因此支持在变换内进行索引。要创建
RigidTransform对象,请使用from_...方法(参见下面的示例)。RigidTransform(...)不应直接实例化。有关刚性变换的严格介绍,请参见 [2]、[3] 和 [4]。
- 属性:
single此实例是否表示单个变换。
rotation返回变换的旋转分量。
translation返回变换的平移分量。
方法
__len__(self)返回此对象中的变换数量。
__getitem__(self, indexer)从此对象中提取给定索引处的变换。
__mul__(self, RigidTransform other)将此变换与另一个变换组合。
__pow__(self, float n)将此变换与自身组合 n 次。
from_matrix(cls, matrix)从 4x4 变换矩阵初始化。
from_rotation(cls, rotation)从旋转初始化,不带平移。
from_translation(cls, translation)从平移 numpy 数组初始化,不带旋转。
from_components(cls, translation, rotation)从平移和旋转分量初始化刚性变换。
from_exp_coords(cls, exp_coords)从变换的指数坐标初始化。
from_dual_quat(cls, dual_quat, *[, scalar_first])从单位对偶四元数初始化。
as_matrix(self)返回变换的矩阵表示的副本。
as_components(self)返回变换的平移和旋转分量,其中先应用旋转,然后再应用平移。
as_exp_coords(self)返回变换的指数坐标。
as_dual_quat(self, *[, scalar_first])返回变换的对偶四元数表示。
concatenate(cls, transforms)将
RigidTransform对象序列连接到单个对象中。apply(self, vector[, inverse])将变换应用于向量。
inv(self)反转此变换。
identity(cls[, num])初始化单位变换。
注释
在版本 1.16.0 中添加。
参考文献
[3][4]Kevin M. Lynch 和 Frank C. Park,“现代机器人学:力学、规划和控制”第 3.3 章,2017 年,剑桥大学出版社。 https://hades.mech.northwestern.edu/images/2/25/MR-v2.pdf#page=107.31
[5]Paul Furgale,“表示机器人姿势:好的、坏的和丑陋的”,2014 年 6 月 9 日。 https://rpg.ifi.uzh.ch/docs/teaching/2024/FurgaleTutorial.pdf
示例
RigidTransform实例可以在上述任何格式中初始化,并转换为其他格式。底层对象独立于用于初始化的表示形式。符号约定和组合
此处的符号在很大程度上遵循 [5] 中定义的约定。当我们命名变换时,我们从右到左读取下标。因此,
tf_A_B表示变换 A <- B,可以解释为B 相对于 A 的坐标和方向
将点从 B 变换到 A
在 A 的坐标系中描述的 B 的姿势
tf_A_B ^ ^ | | | --- from B | ----- to A
组合变换时,顺序很重要。变换不具有交换性,因此通常
tf_A_B * tf_B_C与tf_B_C * tf_A_B不同。变换从右到左组合并应用于向量。因此,(tf_A_B * tf_B_C).apply(p_C)与tf_A_B.apply(tf_B_C.apply(p_C))相同。组合变换时,变换的顺序应使乘法运算符被单个框架包围,因此框架“抵消”并且外部框架保持不变。在下面的示例中,B 抵消,外部框架 A 和 C 保持不变。或者换句话说,A <- C 与 A <- B <- C 相同。
----------- B cancels out | | v v tf_A_C = tf_A_B * tf_B_C ^ ^ | | ------------ to A, from C are left
当我们注释向量时,我们写下向量定义的框架的下标。因此,
p_B表示在框架 B 中定义的点p。要将此点从框架 B 变换到框架 A 中的坐标,我们将变换tf_A_B应用于向量,使带注释的 B 框架彼此相邻并“抵消”。------------ B cancels out | | v v p_A = tf_A_B.apply(p_B) ^ | -------------- A is left
可视化
>>> from scipy.spatial.transform import RigidTransform as Tf >>> from scipy.spatial.transform import Rotation as R >>> import numpy as np
以下函数可用于通过显示变换标准 x、y、z 坐标轴的方式来使用 Matplotlib 绘制变换
>>> import matplotlib.pyplot as plt >>> colors = ("#FF6666", "#005533", "#1199EE") # Colorblind-safe RGB >>> def plot_transformed_axes(ax, tf, name=None, scale=1): ... r = tf.rotation ... t = tf.translation ... loc = np.array([t, t]) ... for i, (axis, c) in enumerate(zip((ax.xaxis, ax.yaxis, ax.zaxis), ... colors)): ... axlabel = axis.axis_name ... axis.set_label_text(axlabel) ... axis.label.set_color(c) ... axis.line.set_color(c) ... axis.set_tick_params(colors=c) ... line = np.zeros((2, 3)) ... line[1, i] = scale ... line_rot = r.apply(line) ... line_plot = line_rot + loc ... ax.plot(line_plot[:, 0], line_plot[:, 1], line_plot[:, 2], c) ... text_loc = line[1]*1.2 ... text_loc_rot = r.apply(text_loc) ... text_plot = text_loc_rot + t ... ax.text(*text_plot, axlabel.upper(), color=c, ... va="center", ha="center") ... ax.text(*tf.translation, name, color="k", va="center", ha="center", ... bbox={"fc": "w", "alpha": 0.8, "boxstyle": "circle"})
定义框架
让我们完成一个例子。
首先,定义“世界框架” A,也称为“基本框架”。从他们自己的角度来看,所有框架都是单位变换。
>>> tf_A = Tf.identity()
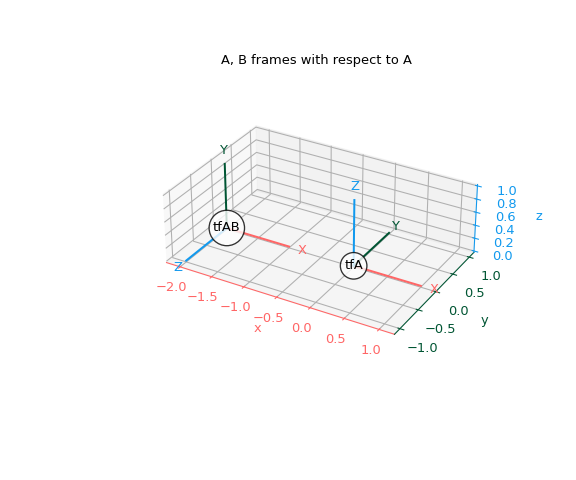
我们将在 A 的坐标系中可视化一个新的框架 B。因此,我们需要定义将坐标从框架 B 转换为框架 A 的变换(A <- B)。
从物理上讲,让我们想象一下通过以下方式从 A 构造 B
绕其 x 轴将 A 旋转 +90 度。
将旋转后的框架在 A 的 -x 方向上平移 2 个单位。
从 A 的角度来看,B 位于 [-2, 0, 0],并绕 x 轴旋转 +90 度,这正是变换 A <- B。
>>> t_A_B = np.array([-2, 0, 0]) >>> r_A_B = R.from_euler('xyz', [90, 0, 0], degrees=True) >>> tf_A_B = Tf.from_components(t_A_B, r_A_B)
让我们绘制这些框架。
>>> fig, ax = plt.subplots(subplot_kw={"projection": "3d"}) >>> plot_transformed_axes(ax, tf_A, name="tfA") # A plotted in A >>> plot_transformed_axes(ax, tf_A_B, name="tfAB") # B plotted in A >>> ax.set_title("A, B frames with respect to A") >>> ax.set_aspect("equal") >>> ax.figure.set_size_inches(6, 5) >>> plt.show()
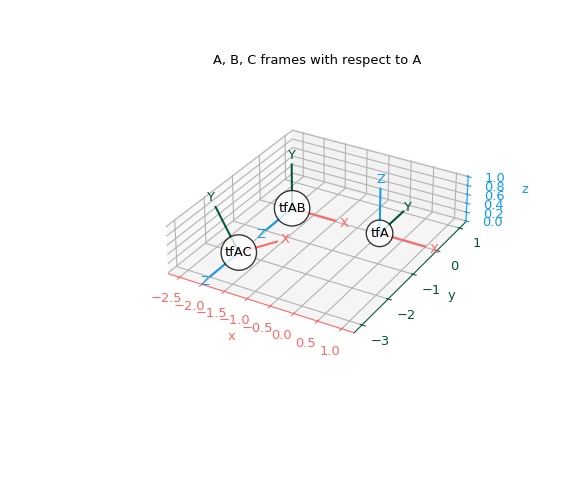
现在让我们在 B 的坐标系中可视化一个新的框架 C。让我们想象一下通过以下方式从 B 构造 C
在其 +z 方向上将 B 平移 2 个单位。
绕其 z 轴将 B 旋转 +30 度。
>>> t_B_C = np.array([0, 0, 2]) >>> r_B_C = R.from_euler('xyz', [0, 0, 30], degrees=True) >>> tf_B_C = Tf.from_components(t_B_C, r_B_C)
为了从一致的角度绘制这些框架,我们需要计算 A 和 C 之间的变换。请注意,我们不会直接进行此变换,而是组合中间变换,让我们从 C 到 A
>>> tf_A_C = tf_A_B * tf_B_C # A <- B <- C
现在我们可以从 A 的角度绘制这三个框架。
>>> fig, ax = plt.subplots(subplot_kw={"projection": "3d"}) >>> plot_transformed_axes(ax, tf_A, name="tfA") # A plotted in A >>> plot_transformed_axes(ax, tf_A_B, name="tfAB") # B plotted in A >>> plot_transformed_axes(ax, tf_A_C, name="tfAC") # C plotted in A >>> ax.set_title("A, B, C frames with respect to A") >>> ax.set_aspect("equal") >>> ax.figure.set_size_inches(6, 5) >>> plt.show()
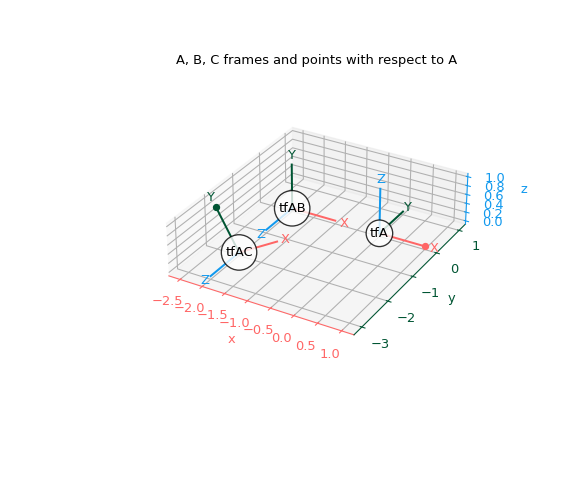
变换向量
让我们将向量从 A 变换到 B 和 C。为此,我们将首先反转我们已经从 B 和 C 到 A 的变换。
>>> tf_B_A = tf_A_B.inv() # B <- A >>> tf_C_A = tf_A_C.inv() # C <- A
现在我们可以定义 A 中的一个点,并使用上述变换来获得它在 B 和 C 中的坐标
>>> p1_A = np.array([1, 0, 0]) # +1 in x_A direction >>> p1_B = tf_B_A.apply(p1_A) >>> p1_C = tf_C_A.apply(p1_A) >>> print(p1_A) # Original point 1 in A [1 0 0] >>> print(p1_B) # Point 1 in B [3. 0. 0.] >>> print(p1_C) # Point 1 in C [ 2.59807621 -1.5 -2. ]
我们也可以反过来。我们定义 C 中的一个点并将其变换为 A
>>> p2_C = np.array([0, 1, 0]) # +1 in y_C direction >>> p2_A = tf_A_C.apply(p2_C) >>> print(p2_C) # Original point 2 in C [0 1 0] >>> print(p2_A) # Point 2 in A [-2.5 -2. 0.8660254]
再次相对于 A 绘制框架,但也绘制这两个点
>>> fig, ax = plt.subplots(subplot_kw={"projection": "3d"}) >>> plot_transformed_axes(ax, tf_A, name="tfA") # A plotted in A >>> plot_transformed_axes(ax, tf_A_B, name="tfAB") # B plotted in A >>> plot_transformed_axes(ax, tf_A_C, name="tfAC") # C plotted in A >>> ax.scatter(p1_A[0], p1_A[1], p1_A[2], color=colors[0]) # +1 x_A >>> ax.scatter(p2_A[0], p2_A[1], p2_A[2], color=colors[1]) # +1 y_C >>> ax.set_title("A, B, C frames and points with respect to A") >>> ax.set_aspect("equal") >>> ax.figure.set_size_inches(6, 5) >>> plt.show()
切换基本框架
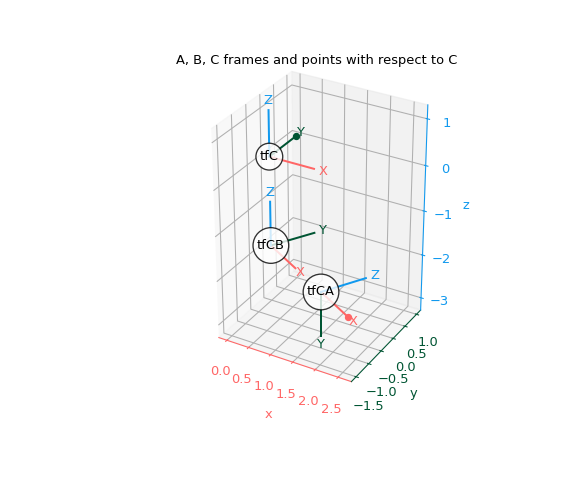
到目前为止,我们一直在从 A 的角度可视化框架。让我们使用我们定义的变换从 C 的角度可视化框架。
现在 C 是“基本框架”或“世界框架”。从他们自己的角度来看,所有框架都是单位变换。
>>> tf_C = Tf.identity()
我们已经定义了变换 C <- A,并且可以通过反转现有变换 B <- C 来获得 C <- B。
>>> tf_C_B = tf_B_C.inv() # C <- B
这让我们从 C 的角度绘制所有内容
>>> fig, ax = plt.subplots(subplot_kw={"projection": "3d"}) >>> plot_transformed_axes(ax, tf_C, name="tfC") # C plotted in C >>> plot_transformed_axes(ax, tf_C_B, name="tfCB") # B plotted in C >>> plot_transformed_axes(ax, tf_C_A, name="tfCA") # A plotted in C >>> ax.scatter(p1_C[0], p1_C[1], p1_C[2], color=colors[0]) >>> ax.scatter(p2_C[0], p2_C[1], p2_C[2], color=colors[1]) >>> ax.set_title("A, B, C frames and points with respect to C") >>> ax.set_aspect("equal") >>> ax.figure.set_size_inches(6, 5) >>> plt.show()