线性代数 (scipy.linalg)#
当 SciPy 使用优化的 ATLAS LAPACK 和 BLAS 库构建时,它具有非常快的线性代数功能。如果您深入研究,所有原始 LAPACK 和 BLAS 库都可供您使用,以获得更快的速度。在本节中,将介绍一些更易于使用的这些例程接口。
所有这些线性代数例程都期望一个可以转换为二维数组的对象。这些例程的输出也是二维数组。
scipy.linalg 与 numpy.linalg#
scipy.linalg 包含 numpy.linalg 中的所有函数,以及一些 numpy.linalg 中没有的更高级函数。
使用 scipy.linalg 相比 numpy.linalg 的另一个优势是,它始终与 BLAS/LAPACK 支持一起编译,而对于 NumPy 则是可选的。因此,SciPy 版本可能更快,具体取决于 NumPy 的安装方式。
因此,除非您不想将 scipy 作为依赖项添加到您的 numpy 程序中,否则请使用 scipy.linalg 而不是 numpy.linalg。
numpy.matrix 与 2-D numpy.ndarray#
表示矩阵的类以及基本运算(如矩阵乘法和转置)是 numpy 的一部分。为了方便起见,我们总结了 numpy.matrix 和 numpy.ndarray 之间的区别。
numpy.matrix 是一个矩阵类,它比 numpy.ndarray 具有更方便的矩阵运算接口。例如,此类支持通过分号的 MATLAB 式创建语法,将矩阵乘法作为 * 运算符的默认值,并且包含 I 和 T 成员,它们用作逆矩阵和转置的快捷方式。
>>> import numpy as np
>>> A = np.asmatrix('[1 2;3 4]')
>>> A
matrix([[1, 2],
[3, 4]])
>>> A.I
matrix([[-2. , 1. ],
[ 1.5, -0.5]])
>>> b = np.asmatrix('[5 6]')
>>> b
matrix([[5, 6]])
>>> b.T
matrix([[5],
[6]])
>>> A*b.T
matrix([[17],
[39]])
尽管很方便,但建议不要使用 numpy.matrix 类,因为它没有添加任何无法通过 2-D numpy.ndarray 对象完成的功能,并且可能会导致混淆使用哪个类。例如,上面的代码可以改写为
>>> import numpy as np
>>> from scipy import linalg
>>> A = np.array([[1,2],[3,4]])
>>> A
array([[1, 2],
[3, 4]])
>>> linalg.inv(A)
array([[-2. , 1. ],
[ 1.5, -0.5]])
>>> b = np.array([[5,6]]) #2D array
>>> b
array([[5, 6]])
>>> b.T
array([[5],
[6]])
>>> A*b #not matrix multiplication!
array([[ 5, 12],
[15, 24]])
>>> A.dot(b.T) #matrix multiplication
array([[17],
[39]])
>>> b = np.array([5,6]) #1D array
>>> b
array([5, 6])
>>> b.T #not matrix transpose!
array([5, 6])
>>> A.dot(b) #does not matter for multiplication
array([17, 39])
scipy.linalg 操作可以同样应用于 numpy.matrix 或 2D numpy.ndarray 对象。
基本例程#
求逆矩阵#
矩阵 \(\mathbf{A}\) 的逆矩阵是矩阵 \(\mathbf{B}\),使得 \(\mathbf{AB}=\mathbf{I}\),其中 \(\mathbf{I}\) 是主对角线上为 1 的单位矩阵。通常,\(\mathbf{B}\) 表示为 \(\mathbf{B}=\mathbf{A}^{-1}\)。在 SciPy 中,NumPy 数组 A 的矩阵逆可以使用 linalg.inv (A) 获取,或者如果 A 是一个矩阵,则可以使用 A.I 获取。例如,设
那么
以下示例演示了在 SciPy 中的计算
>>> import numpy as np
>>> from scipy import linalg
>>> A = np.array([[1,3,5],[2,5,1],[2,3,8]])
>>> A
array([[1, 3, 5],
[2, 5, 1],
[2, 3, 8]])
>>> linalg.inv(A)
array([[-1.48, 0.36, 0.88],
[ 0.56, 0.08, -0.36],
[ 0.16, -0.12, 0.04]])
>>> A.dot(linalg.inv(A)) #double check
array([[ 1.00000000e+00, -1.11022302e-16, -5.55111512e-17],
[ 3.05311332e-16, 1.00000000e+00, 1.87350135e-16],
[ 2.22044605e-16, -1.11022302e-16, 1.00000000e+00]])
求解线性方程组#
使用 scipy 命令 linalg.solve 可以直接求解线性方程组。此命令需要一个输入矩阵和一个右手边向量。然后计算解向量。提供了一个用于输入对称矩阵的选项,这可以在适用时加快处理速度。例如,假设需要求解以下联立方程
可以使用矩阵逆找到解向量
但是,最好使用 linalg.solve 命令,它可能更快且数值更稳定。在这种情况下,它会给出与以下示例中显示的相同答案
>>> import numpy as np
>>> from scipy import linalg
>>> A = np.array([[1, 2], [3, 4]])
>>> A
array([[1, 2],
[3, 4]])
>>> b = np.array([[5], [6]])
>>> b
array([[5],
[6]])
>>> linalg.inv(A).dot(b) # slow
array([[-4. ],
[ 4.5]])
>>> A.dot(linalg.inv(A).dot(b)) - b # check
array([[ 8.88178420e-16],
[ 2.66453526e-15]])
>>> np.linalg.solve(A, b) # fast
array([[-4. ],
[ 4.5]])
>>> A.dot(np.linalg.solve(A, b)) - b # check
array([[ 0.],
[ 0.]])
求行列式#
方阵 \(\mathbf{A}\) 的行列式通常记为 \(\left|\mathbf{A}\right|\),它是一个在线性代数中经常使用的量。假设 \(a_{ij}\) 是矩阵 \(\mathbf{A}\) 的元素,并令 \(M_{ij}=\left|\mathbf{A}_{ij}\right|\) 为从 \(\mathbf{A}\) 中删除第 \(i^{\textrm{th}}\) 行和第 \(j^{\textrm{th}}\) 列后剩余矩阵的行列式。那么,对于任何行 \(i,\)
这是一种递归定义行列式的方法,其中基本情况定义为接受 \(1\times1\) 矩阵的行列式是唯一的矩阵元素。在 SciPy 中,可以使用 linalg.det 计算行列式。例如,
的行列式为
在 SciPy 中,可以使用以下示例计算:
>>> import numpy as np
>>> from scipy import linalg
>>> A = np.array([[1,2],[3,4]])
>>> A
array([[1, 2],
[3, 4]])
>>> linalg.det(A)
-2.0
计算范数#
矩阵和向量范数也可以使用 SciPy 计算。可以使用 linalg.norm 函数的不同参数来计算各种范数定义。此函数接受一个秩 1(向量)或秩 2(矩阵)数组和一个可选的 order 参数(默认值为 2)。根据这些输入,将计算请求阶数的向量或矩阵范数。
对于向量 x,order 参数可以是任何实数,包括 inf 或 -inf。计算的范数为
对于矩阵 \(\mathbf{A}\),范数的有效值只有 \(\pm2,\pm1,\) \(\pm\) inf 和 'fro'(或 'f')。因此,
其中 \(\sigma_{i}\) 是 \(\mathbf{A}\) 的奇异值。
示例
>>> import numpy as np
>>> from scipy import linalg
>>> A=np.array([[1,2],[3,4]])
>>> A
array([[1, 2],
[3, 4]])
>>> linalg.norm(A)
5.4772255750516612
>>> linalg.norm(A,'fro') # frobenius norm is the default
5.4772255750516612
>>> linalg.norm(A,1) # L1 norm (max column sum)
6
>>> linalg.norm(A,-1)
4
>>> linalg.norm(A,np.inf) # L inf norm (max row sum)
7
求解线性最小二乘问题和伪逆#
线性最小二乘问题出现在应用数学的许多分支中。在这个问题中,我们寻找一组线性缩放系数,使模型能够拟合数据。具体来说,我们假设数据 \(y_{i}\) 与数据 \(\mathbf{x}_{i}\) 通过一组系数 \(c_{j}\) 和模型函数 \(f_{j}\left(\mathbf{x}_{i}\right)\) 以及模型
其中 \(\epsilon_{i}\) 表示数据中的不确定性。最小二乘法的策略是选择系数 \(c_{j}\) 来最小化
理论上,全局最小值将在以下情况下出现
或
其中
当 \(\mathbf{A^{H}A}\) 可逆时,则
其中 \(\mathbf{A}^{\dagger}\) 称为 \(\mathbf{A}.\) 的伪逆。注意,使用这个定义的 \(\mathbf{A}\),模型可以写成
命令 linalg.lstsq 将解决给定 \(\mathbf{A}\) 和 \(\mathbf{y}\) 的线性最小二乘问题,求解 \(\mathbf{c}\)。此外,linalg.pinv 将在给定 \(\mathbf{A}\) 的情况下找到 \(\mathbf{A}^{\dagger}\)。
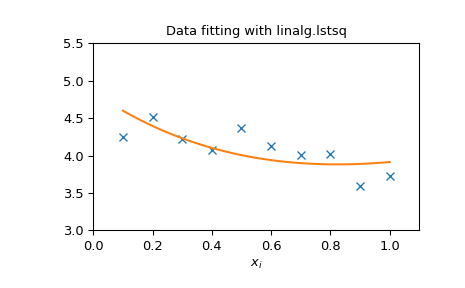
以下示例和图示演示了使用 linalg.lstsq 和 linalg.pinv 解决数据拟合问题。以下显示的数据使用模型生成
其中 \(x_{i}=0.1i\) 对于 \(i=1\ldots10\),\(c_{1}=5\),以及 \(c_{2}=4.\) 噪声被添加到 \(y_{i}\) 中,系数 \(c_{1}\) 和 \(c_{2}\) 使用线性最小二乘法估计。
>>> import numpy as np
>>> from scipy import linalg
>>> import matplotlib.pyplot as plt
>>> rng = np.random.default_rng()
>>> c1, c2 = 5.0, 2.0
>>> i = np.r_[1:11]
>>> xi = 0.1*i
>>> yi = c1*np.exp(-xi) + c2*xi
>>> zi = yi + 0.05 * np.max(yi) * rng.standard_normal(len(yi))
>>> A = np.c_[np.exp(-xi)[:, np.newaxis], xi[:, np.newaxis]]
>>> c, resid, rank, sigma = linalg.lstsq(A, zi)
>>> xi2 = np.r_[0.1:1.0:100j]
>>> yi2 = c[0]*np.exp(-xi2) + c[1]*xi2
>>> plt.plot(xi,zi,'x',xi2,yi2)
>>> plt.axis([0,1.1,3.0,5.5])
>>> plt.xlabel('$x_i$')
>>> plt.title('Data fitting with linalg.lstsq')
>>> plt.show()
广义逆#
广义逆是使用命令 linalg.pinv 计算的。设 \(\mathbf{A}\) 为一个 \(M\times N\) 矩阵,那么如果 \(M>N\),广义逆为
而如果 \(M<N\) 矩阵,广义逆为
在 \(M=N\) 的情况下,则
只要 \(\mathbf{A}\) 可逆。
分解#
在许多应用中,使用其他表示形式分解矩阵非常有用。SciPy 支持几种分解。
特征值和特征向量#
特征值-特征向量问题是最常用的线性代数运算之一。在一个流行的形式中,特征值-特征向量问题是为某个方阵 \(\mathbf{A}\) 寻找标量 \(\lambda\) 和相应的向量 \(\mathbf{v}\),使得
对于一个 \(N\times N\) 矩阵,有 \(N\) 个(不一定是不同的)特征值——(特征)多项式的根
特征向量 \(\mathbf{v}\) 有时也被称为右特征向量,以区别于另一组满足以下条件的左特征向量
或
使用默认的可选参数,命令 linalg.eig 返回 \(\lambda\) 和 \(\mathbf{v}.\) 但是,它也可以返回 \(\mathbf{v}_{L}\) 和仅 \(\lambda\) 本身(linalg.eigvals 也只返回 \(\lambda\))。
此外,linalg.eig 还可以解决更一般的特征值问题
对于方阵 \(\mathbf{A}\) 和 \(\mathbf{B}.\) 标准特征值问题是 \(\mathbf{B}=\mathbf{I}.\) 的一般特征值问题的特例。当广义特征值问题可以求解时,它提供了 \(\mathbf{A}\) 的分解,如下所示:
其中 \(\mathbf{V}\) 是将特征向量收集到列中的矩阵,而 \(\boldsymbol{\Lambda}\) 是特征值的对角矩阵。
根据定义,特征向量仅在常数比例因子下定义。在 SciPy 中,特征向量的比例因子选择为 \(\left\Vert \mathbf{v}\right\Vert ^{2}=\sum_{i}v_{i}^{2}=1.\)
例如,考虑求解矩阵的特征值和特征向量
特征多项式为
该多项式的根是 \(\mathbf{A}\) 的特征值
可以使用原始方程找到与每个特征值对应的特征向量。然后可以找到与这些特征值相关的特征向量。
>>> import numpy as np
>>> from scipy import linalg
>>> A = np.array([[1, 2], [3, 4]])
>>> la, v = linalg.eig(A)
>>> l1, l2 = la
>>> print(l1, l2) # eigenvalues
(-0.3722813232690143+0j) (5.372281323269014+0j)
>>> print(v[:, 0]) # first eigenvector
[-0.82456484 0.56576746]
>>> print(v[:, 1]) # second eigenvector
[-0.41597356 -0.90937671]
>>> print(np.sum(abs(v**2), axis=0)) # eigenvectors are unitary
[1. 1.]
>>> v1 = np.array(v[:, 0]).T
>>> print(linalg.norm(A.dot(v1) - l1*v1)) # check the computation
3.23682852457e-16
奇异值分解#
奇异值分解 (SVD) 可以被认为是对非方阵的特征值问题的扩展。令 \(\mathbf{A}\) 为一个 \(M\times N\) 矩阵,其中 \(M\) 和 \(N\) 为任意值。矩阵 \(\mathbf{A}^{H}\mathbf{A}\) 和 \(\mathbf{A}\mathbf{A}^{H}\) 是大小分别为 \(N\times N\) 和 \(M\times M\) 的方阵厄米矩阵 [1]。已知方阵厄米矩阵的特征值为实数且非负。此外,\(\mathbf{A}^{H}\mathbf{A}\) 和 \(\mathbf{A}\mathbf{A}^{H}.\) 的非零特征值最多有 \(\min\left(M,N\right)\) 个相同的值。将这些正特征值定义为 \(\sigma_{i}^{2}.\) 它们的平方根被称为 \(\mathbf{A}.\) 的奇异值。将 \(\mathbf{A}^{H}\mathbf{A}\) 的特征向量按列收集到一个 \(N\times N\) 的酉矩阵 [2] \(\mathbf{V}\) 中,而将 \(\mathbf{A}\mathbf{A}^{H}\) 的特征向量按列收集到酉矩阵 \(\mathbf{U}\) 中,将奇异值收集到一个 \(M\times N\) 的零矩阵 \(\mathbf{\boldsymbol{\Sigma}}\) 中,其主对角线元素设置为奇异值。然后
是 \(\mathbf{A}.\) 的奇异值分解。每个矩阵都有一个奇异值分解。有时,奇异值被称为 \(\mathbf{A}.\) 的谱。命令 linalg.svd 将返回 \(\mathbf{U}\)、\(\mathbf{V}^{H}\) 和 \(\sigma_{i}\) 作为奇异值的数组。要获得矩阵 \(\boldsymbol{\Sigma}\),请使用 linalg.diagsvd。以下示例说明了 linalg.svd 的用法
>>> import numpy as np
>>> from scipy import linalg
>>> A = np.array([[1,2,3],[4,5,6]])
>>> A
array([[1, 2, 3],
[4, 5, 6]])
>>> M,N = A.shape
>>> U,s,Vh = linalg.svd(A)
>>> Sig = linalg.diagsvd(s,M,N)
>>> U, Vh = U, Vh
>>> U
array([[-0.3863177 , -0.92236578],
[-0.92236578, 0.3863177 ]])
>>> Sig
array([[ 9.508032 , 0. , 0. ],
[ 0. , 0.77286964, 0. ]])
>>> Vh
array([[-0.42866713, -0.56630692, -0.7039467 ],
[ 0.80596391, 0.11238241, -0.58119908],
[ 0.40824829, -0.81649658, 0.40824829]])
>>> U.dot(Sig.dot(Vh)) #check computation
array([[ 1., 2., 3.],
[ 4., 5., 6.]])
LU 分解#
LU 分解找到 \(M\times N\) 矩阵 \(\mathbf{A}\) 的表示形式为
其中 \(\mathbf{P}\) 是一个 \(M\times M\) 置换矩阵(单位矩阵的行置换),\(\mathbf{L}\) 是一个 \(M\times K\) 下三角或梯形矩阵(\(K=\min\left(M,N\right)\))且对角线元素为 1,\(\mathbf{U}\) 是一个上三角或梯形矩阵。SciPy 中用于此分解的命令是 linalg.lu.
这种分解通常用于求解许多联立方程,其中左侧不变,但右侧变化。例如,假设我们要求解
对于许多不同的 \(\mathbf{b}_{i}\)。LU 分解允许将其写成
由于 \(\mathbf{L}\) 是下三角矩阵,因此可以使用前向和后向替换非常快速地求解 \(\mathbf{U}\mathbf{x}_{i}\),最终求解 \(\mathbf{x}_{i}\)。对 \(\mathbf{A}\) 进行因式分解的初始时间允许在未来快速求解类似的方程组。如果执行 LU 分解的目的是为了求解线性方程组,那么应该使用命令 linalg.lu_factor,然后重复使用命令 linalg.lu_solve 来为每个新的右侧求解方程组。
Cholesky 分解#
Cholesky 分解是 LU 分解的一种特殊情况,适用于 Hermitian 正定矩阵。当 \(\mathbf{A}=\mathbf{A}^{H}\) 且 \(\mathbf{x}^{H}\mathbf{Ax}\geq0\) 对于所有 \(\mathbf{x}\) 成立时,可以找到 \(\mathbf{A}\) 的分解,使得
其中 \(\mathbf{L}\) 是下三角矩阵,\(\mathbf{U}\) 是上三角矩阵。请注意 \(\mathbf{L}=\mathbf{U}^{H}.\) 命令 linalg.cholesky 计算 Cholesky 分解。为了使用 Cholesky 分解来求解方程组,还有 linalg.cho_factor 和 linalg.cho_solve 函数,它们的工作方式类似于它们的 LU 分解对应函数。
QR 分解#
QR 分解(有时称为极分解)适用于任何 \(M\times N\) 矩阵,并找到一个 \(M\times M\) 酉矩阵 \(\mathbf{Q}\) 和一个 \(M\times N\) 上梯形矩阵 \(\mathbf{R}\),使得
请注意,如果已知 \(\mathbf{A}\) 的 SVD,则可以找到 QR 分解。
意味着 \(\mathbf{Q}=\mathbf{U}\) 和 \(\mathbf{R}=\boldsymbol{\Sigma}\mathbf{V}^{H}.\) 但是请注意,在 SciPy 中,使用独立的算法来查找 QR 和 SVD 分解。QR 分解的命令是 linalg.qr.
舒尔分解#
对于一个方阵 \(N\times N\) 矩阵 \(\mathbf{A}\),舒尔分解找到(不一定是唯一的)矩阵 \(\mathbf{T}\) 和 \(\mathbf{Z}\),使得
其中 \(\mathbf{Z}\) 是一个酉矩阵,\(\mathbf{T}\) 是上三角矩阵或准上三角矩阵,具体取决于是否请求实 Schur 形式或复 Schur 形式。对于实 Schur 形式,当 \(\mathbf{A}\) 为实数时,\(\mathbf{T}\) 和 \(\mathbf{Z}\) 都是实数。当 \(\mathbf{A}\) 是实数矩阵时,实 Schur 形式仅为准上三角形式,因为对应于任何复数特征值的 \(2\times2\) 块从主对角线突出。命令 linalg.schur 找到 Schur 分解,而命令 linalg.rsf2csf 将 \(\mathbf{T}\) 和 \(\mathbf{Z}\) 从实 Schur 形式转换为复 Schur 形式。Schur 形式在计算矩阵函数时特别有用。
以下示例说明了 Schur 分解
>>> from scipy import linalg
>>> A = np.asmatrix('[1 3 2; 1 4 5; 2 3 6]')
>>> T, Z = linalg.schur(A)
>>> T1, Z1 = linalg.schur(A, 'complex')
>>> T2, Z2 = linalg.rsf2csf(T, Z)
>>> T
array([[ 9.90012467, 1.78947961, -0.65498528],
[ 0. , 0.54993766, -1.57754789],
[ 0. , 0.51260928, 0.54993766]])
>>> T2
array([[ 9.90012467+0.00000000e+00j, -0.32436598+1.55463542e+00j,
-0.88619748+5.69027615e-01j],
[ 0. +0.00000000e+00j, 0.54993766+8.99258408e-01j,
1.06493862+3.05311332e-16j],
[ 0. +0.00000000e+00j, 0. +0.00000000e+00j,
0.54993766-8.99258408e-01j]])
>>> abs(T1 - T2) # different
array([[ 1.06604538e-14, 2.06969555e+00, 1.69375747e+00], # may vary
[ 0.00000000e+00, 1.33688556e-15, 4.74146496e-01],
[ 0.00000000e+00, 0.00000000e+00, 1.13220977e-15]])
>>> abs(Z1 - Z2) # different
array([[ 0.06833781, 0.88091091, 0.79568503], # may vary
[ 0.11857169, 0.44491892, 0.99594171],
[ 0.12624999, 0.60264117, 0.77257633]])
>>> T, Z, T1, Z1, T2, Z2 = map(np.asmatrix,(T,Z,T1,Z1,T2,Z2))
>>> abs(A - Z*T*Z.H) # same
matrix([[ 5.55111512e-16, 1.77635684e-15, 2.22044605e-15],
[ 0.00000000e+00, 3.99680289e-15, 8.88178420e-16],
[ 1.11022302e-15, 4.44089210e-16, 3.55271368e-15]])
>>> abs(A - Z1*T1*Z1.H) # same
matrix([[ 4.26993904e-15, 6.21793362e-15, 8.00007092e-15],
[ 5.77945386e-15, 6.21798014e-15, 1.06653681e-14],
[ 7.16681444e-15, 8.90271058e-15, 1.77635764e-14]])
>>> abs(A - Z2*T2*Z2.H) # same
matrix([[ 6.02594127e-16, 1.77648931e-15, 2.22506907e-15],
[ 2.46275555e-16, 3.99684548e-15, 8.91642616e-16],
[ 8.88225111e-16, 8.88312432e-16, 4.44104848e-15]])
插值分解#
scipy.linalg.interpolative 包含用于计算矩阵的插值分解 (ID) 的例程。对于秩为 \(k \leq \min \{ m, n \}\) 的矩阵 \(A \in \mathbb{C}^{m \times n}\),这是一个分解
其中 \(\Pi = [\Pi_{1}, \Pi_{2}]\) 是一个置换矩阵,其中 \(\Pi_{1} \in \{ 0, 1 \}^{n \times k}\),即 \(A \Pi_{2} = A \Pi_{1} T\)。这等效于写成 \(A = BP\),其中 \(B = A \Pi_{1}\) 和 \(P = [I, T] \Pi^{\mathsf{T}}\) 分别是骨架和插值矩阵。
另请参阅
scipy.linalg.interpolative — 了解更多信息。
矩阵函数#
考虑函数 \(f\left(x\right)\) 的泰勒级数展开
可以使用这个泰勒级数为方阵 \(\mathbf{A}\) 定义矩阵函数
注意
虽然这为矩阵函数提供了一个有用的表示,但它很少是计算矩阵函数的最佳方法。特别是,如果矩阵不可对角化,结果可能不准确。
指数和对数函数#
矩阵指数是最常见的矩阵函数之一。实现矩阵指数的首选方法是使用缩放和 \(e^{x}\) 的 Padé 近似。此算法在 linalg.expm 中实现。
矩阵指数的逆是矩阵对数,定义为矩阵指数的逆
可以使用 linalg.logm 获取矩阵对数。
三角函数#
三角函数 \(\sin\)、\(\cos\) 和 \(\tan\) 在 linalg.sinm、linalg.cosm 和 linalg.tanm 中分别针对矩阵实现。可以使用欧拉恒等式定义矩阵正弦和余弦
正切为
因此,矩阵正切定义为
双曲三角函数#
双曲三角函数,\(\sinh\),\(\cosh\),和\(\tanh\),也可以使用熟悉的定义为矩阵定义
这些矩阵函数可以使用 linalg.sinhm,linalg.coshm,和 linalg.tanhm 找到。
任意函数#
最后,任何接受一个复数并返回一个复数的任意函数都可以使用命令 linalg.funm 作为矩阵函数调用。此命令接受矩阵和任意 Python 函数。然后,它实现 Golub 和 Van Loan 的书“矩阵计算”中的一种算法,使用 Schur 分解计算应用于矩阵的函数。请注意,该函数需要接受复数作为输入才能与该算法一起使用。例如,以下代码计算应用于矩阵的零阶贝塞尔函数。
>>> from scipy import special, linalg
>>> rng = np.random.default_rng()
>>> A = rng.random((3, 3))
>>> B = linalg.funm(A, lambda x: special.jv(0, x))
>>> A
array([[0.06369197, 0.90647174, 0.98024544],
[0.68752227, 0.5604377 , 0.49142032],
[0.86754578, 0.9746787 , 0.37932682]])
>>> B
array([[ 0.6929219 , -0.29728805, -0.15930896],
[-0.16226043, 0.71967826, -0.22709386],
[-0.19945564, -0.33379957, 0.70259022]])
>>> linalg.eigvals(A)
array([ 1.94835336+0.j, -0.72219681+0.j, -0.22270006+0.j])
>>> special.jv(0, linalg.eigvals(A))
array([0.25375345+0.j, 0.87379738+0.j, 0.98763955+0.j])
>>> linalg.eigvals(B)
array([0.25375345+0.j, 0.87379738+0.j, 0.98763955+0.j])
请注意,由于矩阵解析函数的定义方式,贝塞尔函数作用于矩阵特征值。
特殊矩阵#
SciPy 和 NumPy 提供了几个用于创建工程和科学中经常使用的特殊矩阵的函数。
类型 |
函数 |
描述 |
|---|---|---|
块对角线 |
从提供的数组创建块对角矩阵。 |
|
循环 |
创建循环矩阵。 |
|
伴随 |
创建伴随矩阵。 |
|
卷积 |
创建卷积矩阵。 |
|
离散傅里叶 |
创建离散傅里叶变换矩阵。 |
|
费德勒 |
创建对称费德勒矩阵。 |
|
费德勒伴随 |
创建费德勒伴随矩阵。 |
|
阿达玛 |
创建阿达玛矩阵。 |
|
汉克尔 |
创建汉克尔矩阵。 |
|
赫尔默特 |
创建赫尔默特矩阵。 |
|
希尔伯特 |
创建希尔伯特矩阵。 |
|
逆希尔伯特 |
创建希尔伯特矩阵的逆矩阵。 |
|
莱斯利 |
创建莱斯利矩阵。 |
|
帕斯卡 |
创建帕斯卡矩阵。 |
|
逆帕斯卡 |
创建帕斯卡矩阵的逆矩阵。 |
|
托普利茨 |
创建托普利茨矩阵。 |
|
范德蒙德 |
创建范德蒙德矩阵。 |
有关这些函数使用示例,请参阅其各自的文档字符串。